Ölü hesablamalar (Dead reckoning) - Hərəkət edən obyektin mövqeyini təyin etmək üçün istifadə olunan ənənəvi texnika.
Mahiyyəti
Bu metod, obyektin əvvəlki mövqeyindən, sürətindən və hərəkət istiqamətindən istifadə edərək, obyektin yeni mövqeyini təxmini olaraq hesablamağa əsaslanır. Dead reckoning texnologiyası, obyektin təyini və hərəkətinin izlənməsi üçün mövcud olan əsas üsullardan biridir və çox vaxt müasir mövqeləmə sistemləri (məsələn, GPS) ilə birləşdirilərək daha dəqiq nəticələr əldə edilir.
Bu metod ilk dəfə gəmiçilik və aviasiya sahələrində istifadə olunmağa başlanmışdır və zamanla robototexnika, avtonom nəqliyyat vasitələri və hərbi tətbiqlər kimi bir çox sahəyə genişlənmişdir. Dead reckoningin əsas üstünlüyü, mühitdən asılı olmadan obyektin mövqeyini təyin etməyə imkan verməsidir, lakin bu metodun dəqiqliyi zamanla azalır və "drift" adlanan səhvlərlə üzləşir.
Dead reckoning əsasən aşağıdakı üç mühüm parametri təhlil edərək, obyektin hərəkətini izləyir:
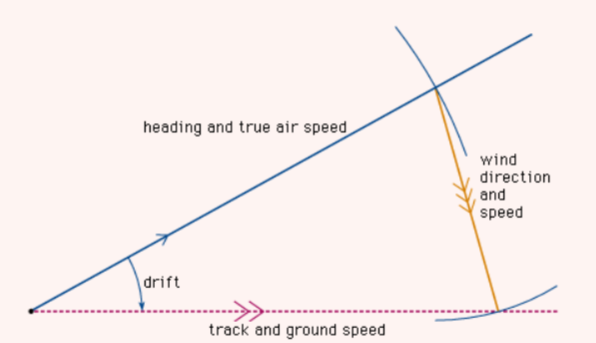
- İstiqamət (Direction): Obyektin hərəkət etdiyi xətt boyunca istiqamət. Bu, ümumiyyətlə, obyektin dövriyyət bucağı və ya yönü ilə ölçülür.
- Sürət (Speed): Obyektin hərəkət etdiyi sürət. Bu məlumat sürətin ölçüldüyü cihazlardan alınır.
- Zaman (Time): Obyektin bu sürət və istiqamətdə nə qədər müddət hərəkət etdiyini göstərən parametrlərdir.
Əsas addımlar
- Başlanğıc mövqeyinin təyin edilməsi: Obyektin ilk mövqeyi dəqiq şəkildə bilinməlidir.
- Sürət və istiqamət ölçülməsi: Obyektin sürəti və hərəkət etdiyi istiqamət ölçülür.
- Hərəkət qrafikinin təsviri: Hər bir zaman intervalında sürət və istiqamət məlumatları istifadə edilərək obyektin yeni mövqeyi təhlil edilir.
- Yeni mövqeyin hesablanması: Başlanğıc nöqtəsindən başlayaraq obyektin hərəkəti izlənir və yeni mövqeyi hesablanır.
Əsas texnologiyaları
1. İnertial Measurement Units (IMU)
- İnertial ölçmə cihazları (IMU), bir obyektin hərəkətini izləmək üçün ən çox istifadə edilən cihazlardır. IMU-lar bir neçə əsas sensoru özündə cəmləyir:
- Akselerometrlər: Obyektin sürətini və təcilini ölçən sensorlardır. Obyektin yer üzərindəki hərəkətini ölçmək üçün, IMU-ya daxil olan akselerometrlər obyektin sürətini təyin edirlər.
- Giroskoplar: Obyektin dönmə bucaqlarını və istiqamətini ölçən cihazlardır. Giroskoplar dövriyyə istiqamətini və dönmə hərəkətlərini izləyərək obyektin yönünü və bucağını müəyyən edir.
2. Magnetometrlər
Magnetometrlər, obyektin istiqamətini təyin etmək üçün ətraf mühitin maqnit sahəsini ölçür. Obyektin yerini və yönünü bilmək üçün maqnit sahəsindən istifadə edən sensorlar, xüsusilə hərəkət edən obyektin dövriyyə bucağını ölçməkdə istifadə edilir. Bu, magnetik sahə dəyişiklikləri ilə bağlı dəqiqlik əldə etməyə kömək edir.
3. GPS (Global Positioning System)
Dead reckoning-in əsas texnologiyası daxili sensorlardır, lakin GPS sistemləri zaman-zaman bu texnologiyanı tamamlayır. GPS, peyk məlumatlarına əsaslanaraq obyektin yerini təyin edir və dəqiq mövqe məlumatı təqdim edir. Dead reckoning və GPS birləşdirildikdə, sistem daha dəqiq nəticələr əldə edir. Lakin, GPS zəif siqnal alan mühitlərdə (məsələn, şəhər daxili və ya tunellərdə) istifadəyə yararsız ola bilər.
4. Optik sensorlar
Optik sensorlar, kameralar və digər vizual cihazlarla obyektin mühitlə qarşılıqlı əlaqəsini izləyir. Bu sensorlar, obyektin hərəkət etdiyi mühitin şəkillərini çəkərək, mühitin xəritəsini yaradır və hərəkətini izləyir. Robototexnikada və avtonom sistemlərdə optik dead reckoning texnologiyası geniş istifadə olunur. Bu metodda şəkillərdən əldə edilən məlumatlar və alqoritmlər istifadə edilərək obyektin mövqeyi təyin edilir.
Tətbiq sahələri
- Gəmiçilik və dəniz nəqliyyatı- Gəmiçilikdə dead reckoning, xüsusən okeanlarda və uzaq məsafələrdə, peyk əsaslı mövqeləmə sistemləri (məsələn, GPS) zəif olduqda vacibdir. Gəminin sürəti və istiqaməti məlumatları istifadə edilərək, dead reckoning obyektin mövqeyini təyin etməyə imkan verir. Bu metod gəmiçilərin uzun məsafələrdə hərəkət etmələrinə və doğru istiqamətə sahib olmalarına kömək edir.
- Aviasiya və təyyarə izləmə- Aviasiya sahəsində dead reckoning, təyyarələrin və helikopterlərin uçuş marşrutlarını izləmək üçün istifadə olunur. Təyyarə həmçinin avtonom uçuşlarda dead reckoning texnologiyası vasitəsilə hərəkət edir. Bu metod, xüsusilə uçaq GPS siqnallarının zəif olduğu bölgələrdə tətbiq olunur. Uçuş marşrutunda təyyarənin sürəti və istiqaməti ölçülərək mövqe hesablamağa imkan verir.
- Avtonom nəqliyyat vasitələri və robototexnika- Avtonom nəqliyyat vasitələri, məsələn, avtomobillər və dronlar, dead reckoning ilə yol hərəkətini izləyir və ətraf mühiti analiz edirlər. Robotlar, xüsusilə qapalı mühitlərdə (məsələn, anbarlarda və ya evdə) hərəkət etdikdə, dead reckoning sistemindən istifadə edərək öz mövqelərini və hərəkət istiqamətlərini təyin edirlər. Dead reckoning, robotların müstəqil olaraq hərəkət etmələrinə imkan verir, çünki obyektlər mühitin xəritəsini və mövqeyini ətraflı şəkildə hesablaya bilirlər.
- Hərbi tətbiqlər- Dead reckoning hərbi tətbiqlərdə, xüsusilə səhra mühitində istifadə edilir. Hərbi avtomobillər, zirehli texnika və hava qüvvələri dead reckoning metodundan istifadə edərək öz mövqelərini müəyyən edirlər. Bu texnologiya GPS-nin etibarlı olmadığı və ya siqnalın kəsildiyi yerlərdə təcili istifadə olunur.
İstinadlar
https://en.wikipedia.org/wiki/Dead_reckoning
https://www.straightdope.com/21343189/is-dead-reckoning-short-for-deduced-reckoning
https://digital-library.theiet.org/doi/10.1049/iet-wss.2014.0043
chrome-extension://efaidnbmnnnibpcajpcglclefindmkaj/https://hsinnamon.web.wesleyan.edu/wescourses/NSB-Psyc255/Readings/17.%20Spatial%20Limbic%20System/Whishaw.pdf
https://tc.canada.ca/en/aviation/publications/civil-aviation-sample-examination-recreational-pilot-permit-private-pilot-licence-aeroplane-tp-13014
https://web.archive.org/web/20170114213819/https://www.bazl.admin.ch/dam/bazl/de/dokumente/Fachleute/Regulationen_und_Grundlagen/111/icao_annex_1_personnellicensing.pdf.download.pdf/icao_annex_1_personnellicensing.pdf
https://books.google.az/books?id=S3biKR21i-QC&q=robot+%22dead+reckoning%22&pg=PA285&redir_esc=y#v=snippet&q=robot%20%22dead%20reckoning%22&f=false
https://www.youtube.com/watch?v=IQt5-LfqeZw
https://ieeexplore.ieee.org/document/8219408
https://books.google.az/books?id=ujfOBQAAQBAJ&dq=%22Believable+Dead+Reckoning+for+Networked+Games%22&pg=PA307&redir_esc=y#v=onepage&q=%22Believable%20Dead%20Reckoning%20for%20Networked%20Games%22&f=false
https://pmc.ncbi.nlm.nih.gov/articles/PMC7612089/
https://skybrary.aero/articles/dead-reckoning-dr
https://www.britannica.com/technology/navigation-technology/Dead-reckoning
Tarix : 6 fevral 2025