Odometriya - Hərəkət edən obyektlərin mövqeyinin və vəziyyətinin ölçülməsi, izlənməsi və təhlil edilməsi üçün istifadə olunan texnologiya.
Mahiyyəti
Əsasən robototexnikada, avtonom nəqliyyat vasitələrində, avtomobillərdə, gəmi və digər nəqliyyat vasitələrində tətbiq olunur. Odometriya, obyektin yerini və istiqamətini təyin etmək üçün ətraf mühitin təhlilini etmədən, yalnız obyektin daxilindən toplanan məlumatları istifadə edir.
Bu sahə daha çox hərəkət təhlili və izləmə ilə əlaqələndirilir, çünki obyektin hərəkətini real vaxtda təhlil edərək onun mövqeyini və hərəkət istiqamətini müəyyən etmək əsas məqsəd olur. Odometriya, mühitin dəyişkənliyindən asılı olmayaraq, mövqeyin təyin edilməsi prosesini asanlaşdırır və mövcud şəraitdən daha dəqiq məlumatlar əldə etməyə imkan verir.
Növləri
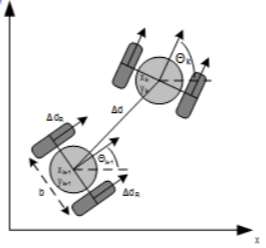
1. Rəqəmsal odometriya-Rəqəmsal odometriya, əsasən robotlar və digər avtomatik hərəkət edən sistemlər üçün tətbiq edilir. Bu metodda, robotun hərəkətini izləmək üçün motorların fırlanma bucaqları və sürətləri ölçülür. Hərəkət etmə zamanı robotun hər iki təkəri ilə ölçülən bucaqlar və məsafə məlumatları toplanır, bu məlumatlara əsasən robotun hərəkəti təhlil edilir. Rəqəmsal odometriya, robotun sadə mühitlərdə, məsələn, düz bir yolda, hərəkət etməsi üçün mükəmməl işləyir.
Rəqəmsal odometriya üçün əsas alətlər:
-Dönmə bucağını ölçən encoderlər (dönmə bucağı və sürətini ölçür).
-Differensial təkər sistemi (iki təkərlə hərəkət edən robotlar üçün).
2. Vizual odometriya (VO)-Vizual odometriya, obyektin hərəkətini izləmək üçün kameralar tərəfindən çəkilən şəkillərdən istifadə edir. Bu metod, obyektin hərəkətini vizual məlumatlardan əldə edilən xüsusiyyətlər vasitəsilə təyin edir. Kameralar vasitəsilə çəkilən şəkillərdəki nöqtələr, kənarlar və ya digər vizual elementlər izlənərək hərəkət hesablanır. Vizual odometriya, xüsusilə robotların mühitləri tanımasında və hərəkətini izləməsində böyük əhəmiyyətə malikdir.
Vizual odometriyanın əsas tətbiq sahələri:
-Robotların ətraf mühiti tanıması və hərəkət etməsi.
-Avtonom nəqliyyat vasitələrinin yol izləməsi.
-Daha dəqiq 3D model çıxarılması.
Vizual odometriya, iki əsas növü əhatə edir:
-Monokulyar vizual odometriya (MonoVO): Bir kamera ilə obyektin hərəkətini izləyir.
-Stereo vizual odometriya (StereoVO): İki kamera ilə obyektin hərəkətini və dərinlik məlumatlarını təyin edir.
3. Lazer odometriyası (LIDAR)- LIDAR (Light Detection and Ranging) texnologiyası, lazer şüalarının ətrafa göndərilməsi və əks olunaraq geri qayıtması ilə məsafə ölçməyə imkan verir. LIDAR odometriyası, ətraf mühitin dəqiq 3D xəritəsini yaratmağa və obyektin hərəkətini təhlil etməyə imkan verir. LIDAR sensorları, hərəkət edən robot və ya avtomobillərin mühitini yüksək dəqiqliklə ölçür, bu da onların mövqeyini təyin etmək üçün istifadə olunur.
LIDAR texnologiyası aşağıdakı sahələrdə istifadə olunur:
-Avtonom nəqliyyat vasitələri (avtomobillər, dronlar, gəmi və s.).
-Topoqrafik xəritəçəkmə və mühitin 3D modelləşdirilməsi.
-Robotların mühitlə qarşılıqlı əlaqəsi və hərəkət planlaması.
4. İnertial o dometriya- İnertial odometriya, akselerometrlər və giroskoplar kimi inertial ölçü vahidləri (IMU) istifadə edərək obyektin hərəkətini izləyir. Bu cihazlar obyektin sürətini, təcilini və hərəkət istiqamətini ölçür. İnertial odometriya, xüsusilə mühitin zəif olduğu və ya vizual məlumatın əldə edilə bilmədiyi hallarda faydalıdır. Lakin, inertial odometriyanın əsas çatışmazlığı zamanla yaranan "drift" adlanan səhvlərdir, bu da ölçmələrin dəqiqliyini azaldır.
İnertial odometriyanın üstünlükləri:
-Real vaxtda məlumat təmin edir.
-Hava şəraitindən və digər mühit faktorlarından asılı deyil.
-Görüntü və lazer məlumatlarına ehtiyac olmadan işləyə bilər.
5. Hibrid odometriya
Hibrid odometriya, müxtəlif texnologiyaların birləşdirilməsi ilə yaranan bir metodologiyadır. Məsələn, vizual odometriya ilə inertial odometriyanın və ya LIDAR ilə rəqəmsal odometriyanın birləşdirilməsi, hər iki metodun üstünlüklərini bir araya gətirir və səhvlərin azaldılmasına kömək edir. Bu, daha etibarlı və dəqiq mövqe izləmə imkanı yaradır.
Hibrid odometriya tətbiqləri:
-Avtonom sistemlərdə daha yüksək dəqiqlik.
-Ətraf mühitin dəyişkən olduğu mühitlərdə işləmə qabiliyyəti.
-Robotların daha mükəmməl hərəkət təhlili və qarşılıqlı əlaqəsi.
Çətinliklər
Drift (Səhv): Zamanla yığılmış xətalar, xüsusilə inertial ölçmələrdə daha çox hiss olunur. Bu səhvlər, odometriyanın nəticələrini zəiflədir və düzəlişlərə ehtiyac yaradır.
Sensor xətaları: Hər bir odometriya növü, öz sensorlarından istifadə edir və bu sensorlardakı səhvlər ümumi sistemin dəqiqliyinə təsir edir.
Ətraf mühitin təsiri: Zəif işıq, bulanıklıq və digər mühit faktorları, xüsusilə vizual odometriya və LIDAR texnologiyalarında nəticələrin dəqiqliyini azaldır.
İstinadlar
https://en.wikipedia.org/wiki/Odometry
https://www.researchgate.net/publication/388599371_Mobile_robot_localization_using_visual_odometry_in_indoor_environments_with_TurtleBot4
https://www.researchgate.net/publication/382560095_CodedVO_Coded_Visual_Odometry
https://www.sciencedirect.com/science/article/pii/S0921889025000156
https://www.sciencedirect.com/science/article/pii/S2667379724000548
https://www.sciencedirect.com/science/article/pii/S0308016124002291
https://www.geeksforgeeks.org/odometry/
https://news.sparkfun.com/11361
https://blog.jloh02.dev/robotics/odometry/
https://hackaday.io/project/158496-imcoders/log/147068-robot-odometry
Tarix : 6 fevral 2025