Görmə əsaslı odometriya (ingiliscə Visual odometry, qısaca VO) - Kompüter görməsi və robotikada istifadə edilən bir texnologiya.
Mahiyyəti
Mühitdəki hərəkətləri izləmək və təhlil etmək məqsədilə kameralar vasitəsilə alınan vizual məlumatlardan istifadə edir. Bu texnologiya, bir obyektin və ya robotun hərəkətini ölçmək və bu hərəkətləri qeyd etmək üçün kameraların çəkdiyi şəkillərdən və video görüntülərindən istifadə edir. Görmə əsaslı odometriya, xüsusən GPS və digər sensorlar mövcud olmayan və ya istifadə edilə bilməyən mühitlərdə tətbiq olunur.
Tarix
Görmə əsaslı odometriya, robotların və digər avtomatlaşdırılmış sistemlərin mühitdə hərəkət etməsini izləmək və idarə etmək məqsədilə inkişaf etmişdir. İlk tədqiqatlar 1970-ci illərin əvvəllərində başlamışdır və bu sahədəki inkişaflar, mobil robotların müstəqil hərəkət etmə qabiliyyətinin artırılmasına yönəlmişdir. 1990-cı illərdə, kameraların keyfiyyətinin artması və kompüter gücünün inkişafı ilə görmə əsaslı odometriya sahəsi daha da irəliləmişdir.
Əsas prinsipləri
- İzləmə və keyfiyyətli nöqtələr: Görmə əsaslı odometriya metodları, kameraların çəkdiyi şəkillərdən seçilən maraqlı xüsusiyyətləri (keyfiyyətli nöqtələr) izləyərək hərəkəti izləyir. Bu xüsusiyyətlər obyektlərin kənarları, konturlar və ya xüsusi nöqtələr kimi görünən məlumatlardan ibarət olur.
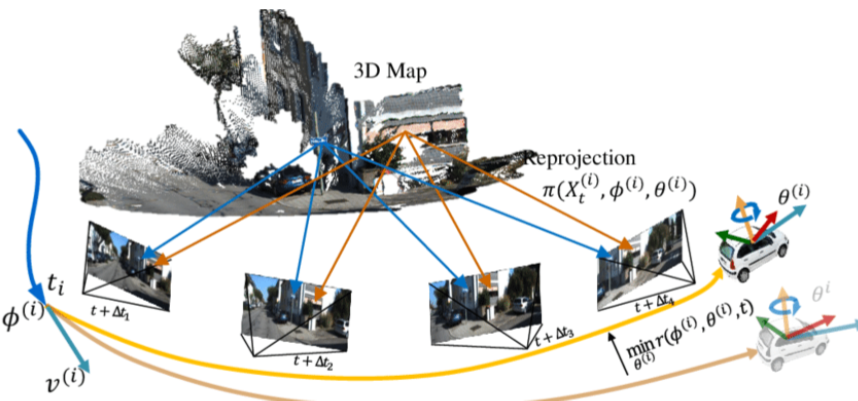
- Kamera mövqeyi və hərəkət: Kameranın mühitə görə mövqeyini və yönünü təyin edən "kamera pozu" hərəkət məlumatlarının əldə edilməsində əsas rol oynayır. Kamera mühitdəki obyektlərə nisbətən hərəkət etdikcə, onun çəkdiyi şəkillər arasındakı dəyişikliklərdən istifadə edərək bu hərəkətlər təhlil edilir.
- 3D Rekonstruksiya: Görmə əsaslı odometriyanın daha irəliləmiş tətbiqlərində, şəkillər arasındakı ölçülərdən istifadə edərək 3D mühitlərin rekonstruksiyası mümkündür. Bu, robotlara ətraf mühitin üç ölçülü modelini yaratmaq imkanı verir.
- İnterpolasiya və süni intellekt: Süni intellekt və maşın öyrənmə alqoritmləri də görmə əsaslı odometriya sistemlərində tətbiq olunmağa başlamışdır. Bu alqoritmlər, daha dəqiq hərəkət izləmə və çevik təhlil təmin edir.
İstinadlar
https://en.wikipedia.org/wiki/Visual_odometry#Egomotion
https://web.archive.org/web/20120224015522/http://eproceedings.worldscinet.com/9789812835772/9789812835772_0128.html
https://www.researchgate.net/publication/387105753_RoMeO_Robust_Metric_Visual_Odometry
https://medium.com/@3502.stkabirdin/introduction-to-visual-odometry-47bcab3aa213
https://springerplus.springeropen.com/articles/10.1186/s40064-016-3573-7
https://www.mathworks.com/help/vision/ug/monocular-visual-odometry.html
https://cgarg92.github.io/Stereo-visual-odometry/
https://paperswithcode.com/task/visual-odometry
Tarix : 6 fevral 2025